|
|
Abstract:
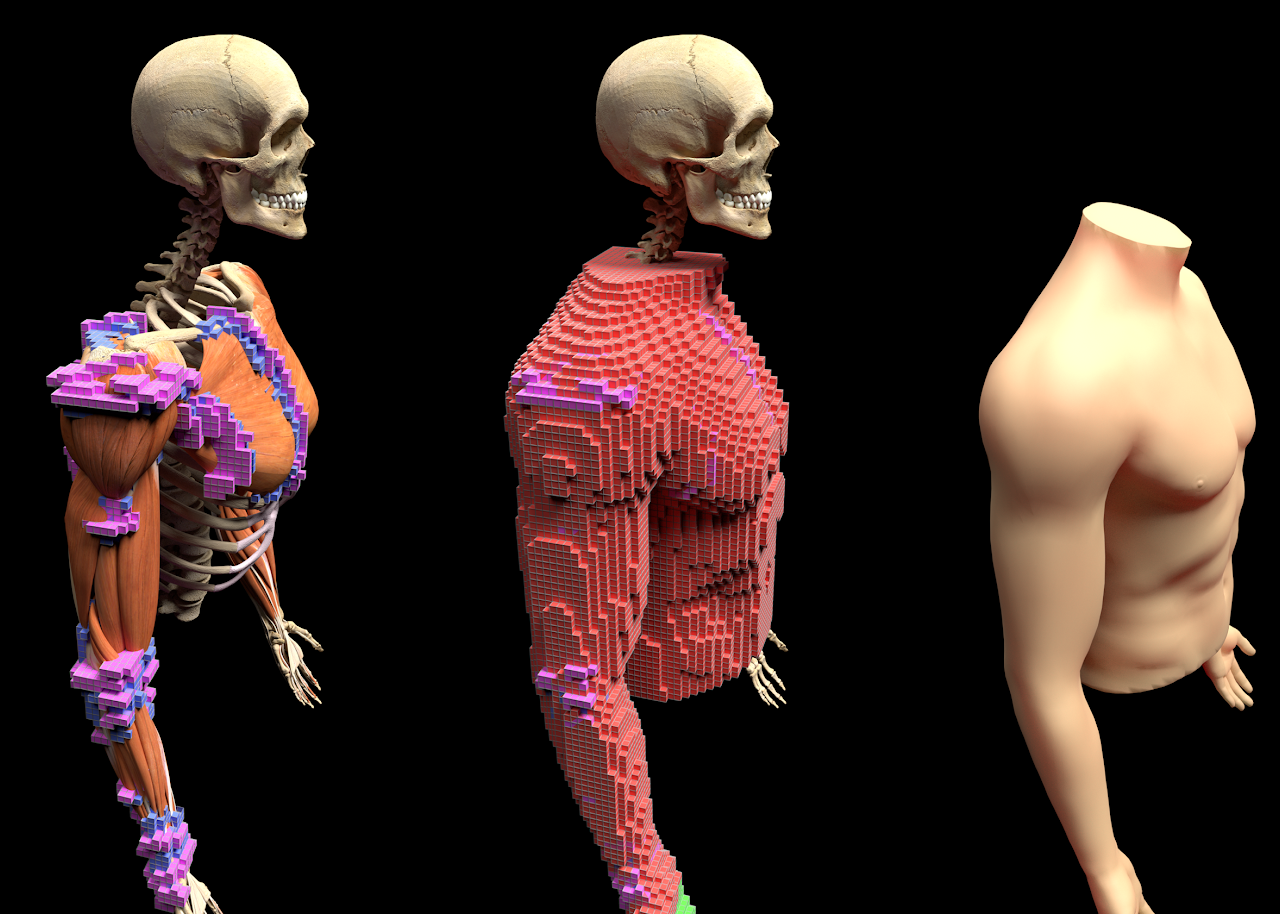
We describe a controller with a fully integrated musculoskeletal model actuated by more than a hundred muscles. Inspired by a QP-based control algorithm, we improved the algorithm to control the volumetric muscles directly. Furthermore, the highly-detailed musculoskeleton was modeled using a non-manifold method and a computation time was effectively reduced through implicit jacobian computation. Our entire system can simulate the musculoskeleton model with detailed volumetric muscles in a feasible computation time.
|

![[PHOTO]](../../images/knight_small.png)