|
|
Abstract:
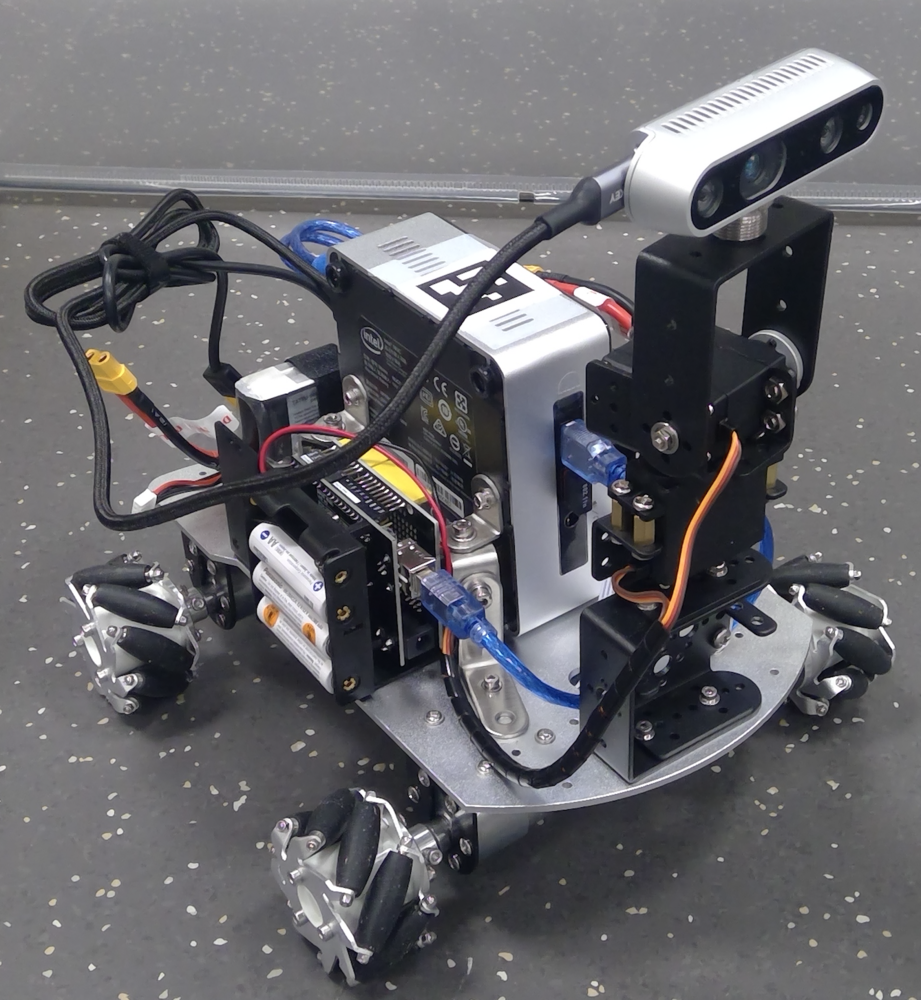
We present a new data-driven technique for predicting the motion of a low-cost omnidirectional mobile robot under the influence of motor torques and friction forces. Our method utilizes a novel differentiable physics engine for analytically computing the gradient of the deviation between predicted motion trajectories and real-world trajectories. This allows to automatically learn and fine-tune the unknown friction coefficients on-the-fly, by minimizing a carefully designed loss function using gradient descent. Experiments show that the predicted trajectories are in excellent agreement with their real-world counterparts. Our proposed approach is computationally superior to existing black-box optimization methods, requiring very few real-world samples for accurate trajectory prediction compared to physics-agnostic techniques, such as neural networks. Experiments also demonstrate that the proposed method allows the robot to quickly adapt to changes in the terrain. Our proposed approach combines the data-efficiency of classical analytical models that are derived from first principles, with the flexibility of data-driven methods, which makes it appropriate for low-cost mobile robots.
|

![[PHOTO]](../../images/knight_small.png)