1. Homework #1¶
For all programming assignments, please turn in your code along with your solution. Submissions should be made on Sakai.
Problem 1
The Lotka-Volterra model for the predator-prey problem comprises of the following system of ordinary differential equations
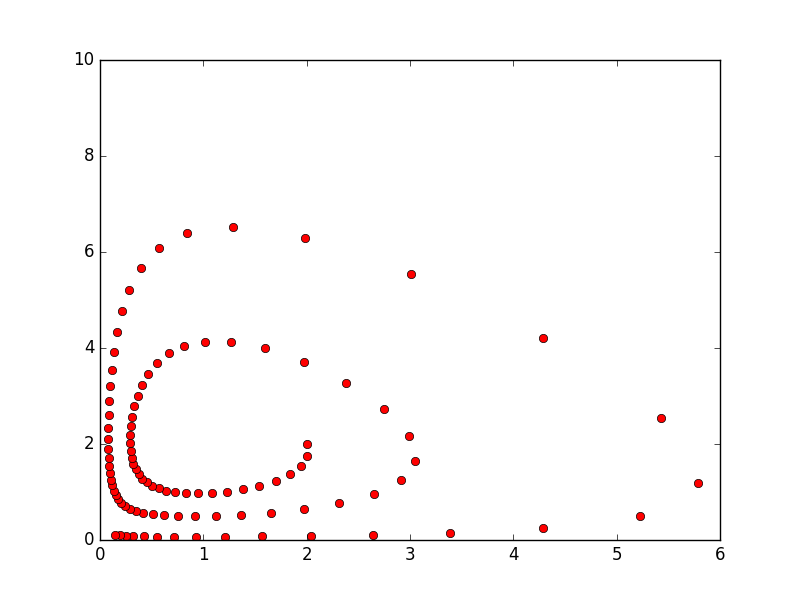
Python code for a forward Euler discretization of the above system with a time step size of \(\Delta t = 0.12\) is given below, and generates the plot shown above.
import matplotlib.pyplot as plt
u = [2]
v = [2]
h = .12
for i in range(1,100):
u_new = u[i-1] + h*u[i-1]*(v[i-1]-2.)
v_new = v[i-1] + h*v[i-1]*(1.-u[i-1])
u.append(u_new)
v.append(v_new)
plt.plot(u,v,'ro')
plt.axis([0,6,0,10])
plt.show()
Using the same time step size of \(\Delta t = 0.12\), compute the plots for a backward Euler discretization (with an initial guess of \((4,8)\)) and a symplectic Euler discretization (with two different initial guesses \((4,2)\) and \((6,2)\)) of the above system of equations.
Problem 2
Implement a rigid body simulator for a freely falling object with some initial angular velocity and upward linear velocity. (Please do not use a sphere, so that the effect of rotations is clearly visible.)